Research staff:
Robot-assisted minimally invasive surgery is the future for cost-effective and pervasive healthcare, with the advantages of reduced pain, heal time, and scarification and the ability to perform remote surgical operation. Ensuring the safety, reliability, and dependability of such cyber-physical surgical robots and related medical devices is critical to ensure the quality and safety of the healthcare provided through this approach. Our research is driven by analysis of real data on failures and safety incidents of medical devices as well as real-time measurements, including biomedical data and machine logs, collected from the health-monitoring systems. We use the knowledge and insights gained from the analysis of data to drive the design of real-time safety monitors and accident data collection and mining techniques for the next generation of safety-critical medical devices and surgical robots.
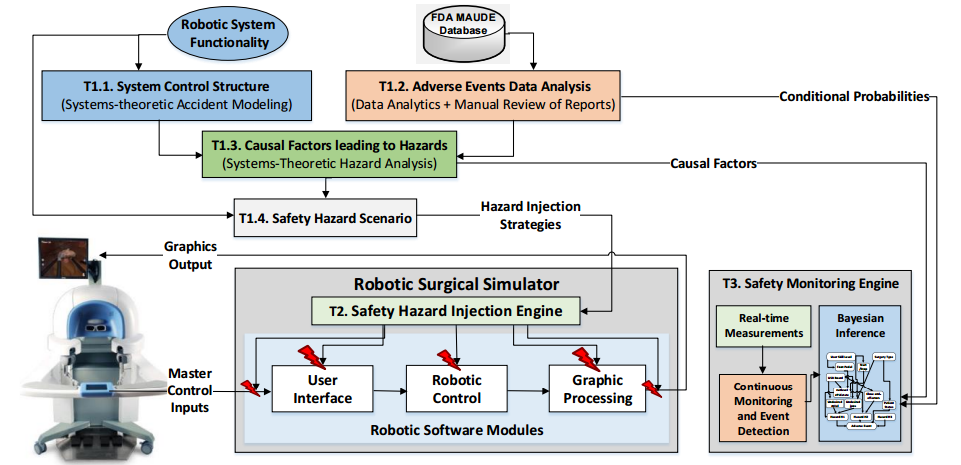
Simulation of safety hazards on the RAVEN Robot
Sudden jump
For credits to video and figures, acknowledgement to the work:
H. Alemzadeh, D. Chen, X. Li, T. Kesavadas, Z. T. Kalbarczyk, R. K. Iyer, “Targeted Attacks on Teleoperated Surgical Robots: Dynamic Model-based Detection and Mitigation,” Proc. 46th IEEE/IFIP Int. Conf. on Dependable Systems and Networks (DSN), 2016. URL: http://ieeexplore.ieee.org/document/7579758/